
485通訊和CAN通訊之間有什么異同?怎樣選擇?
異同點:
(1)物理層差異:485通訊使用差分信號傳輸,常見的物理層包括RS-485和RS-422,而CAN通訊使用雙絞線傳輸,常見的物理層為CAN_H和CAN_L線。
(2)傳輸速度:485通訊的傳輸速度通常較高,最高可達10 Mbps,而CAN通訊的傳輸速度通常較低,最高可達1Mbps。
(3)網絡拓撲結構:485通訊通常采用多主多從的網絡拓撲結構,其中一個主節點控制多個從節點,而CAN通訊通常采用總線型的網絡拓撲結構,所有節點共享同一根總線。
(4)適用領域:485通訊常用于工業自動化領域,如PLC、傳感器和執行器等設備之間的通訊;CAN通訊常用于汽車和工業控制系統等領域,如汽車電子控制單元(ECU)之間的通訊。
選擇方式:
選擇485通訊還是CAN通訊取決于具體應用需求和系統要求。以下是一些建議:
(1)傳輸距離和噪音環境:如果通訊距離較長或噪音環境較惡劣,485通訊可能更適合,因為它具有較好的抗干擾性能。
(2)傳輸速度和實時性要求:如果需要高速傳輸和實時性較高的通訊,CAN通訊可能更適合,因為它支持更高的傳輸速度和優先級機制。
(3)系統復雜度和成本:如果系統規模較大且需要多個主節點控制多個從節點,485通訊可能更合適;如果系統規模相對較小且需要多個節點共享同一總線,CAN通訊可能更合適。
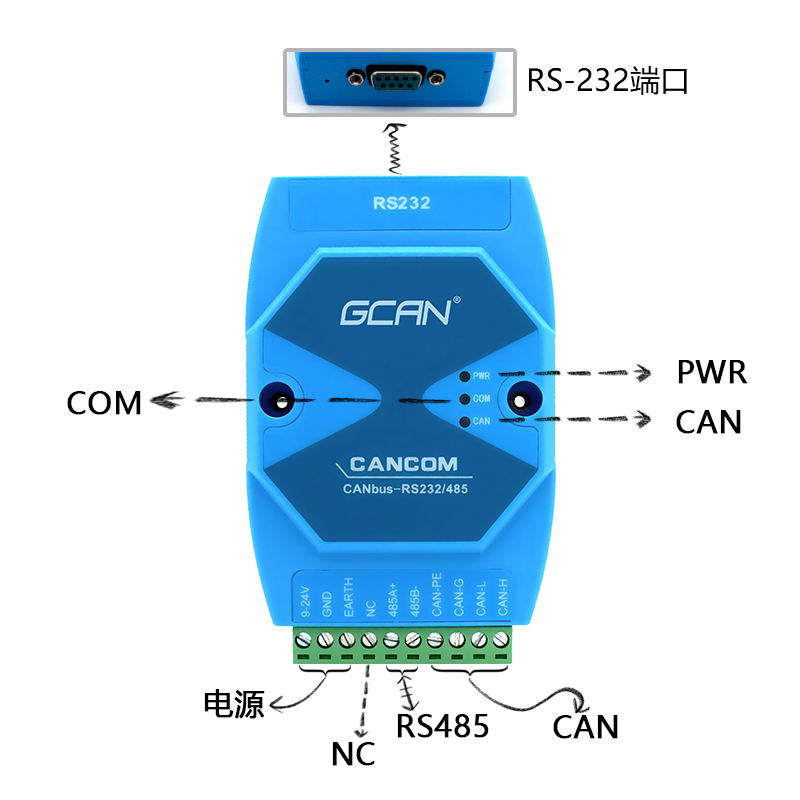
如果您需要實現CANBUS通訊與485通訊相互轉換的網關,可以打電話13019325660找我。
晚上,我們“廣成工控”直播間也會聊相關內容,歡迎觀看。
(1)物理層差異:485通訊使用差分信號傳輸,常見的物理層包括RS-485和RS-422,而CAN通訊使用雙絞線傳輸,常見的物理層為CAN_H和CAN_L線。
(2)傳輸速度:485通訊的傳輸速度通常較高,最高可達10 Mbps,而CAN通訊的傳輸速度通常較低,最高可達1Mbps。
(3)網絡拓撲結構:485通訊通常采用多主多從的網絡拓撲結構,其中一個主節點控制多個從節點,而CAN通訊通常采用總線型的網絡拓撲結構,所有節點共享同一根總線。
(4)適用領域:485通訊常用于工業自動化領域,如PLC、傳感器和執行器等設備之間的通訊;CAN通訊常用于汽車和工業控制系統等領域,如汽車電子控制單元(ECU)之間的通訊。
選擇方式:
選擇485通訊還是CAN通訊取決于具體應用需求和系統要求。以下是一些建議:
(1)傳輸距離和噪音環境:如果通訊距離較長或噪音環境較惡劣,485通訊可能更適合,因為它具有較好的抗干擾性能。
(2)傳輸速度和實時性要求:如果需要高速傳輸和實時性較高的通訊,CAN通訊可能更適合,因為它支持更高的傳輸速度和優先級機制。
(3)系統復雜度和成本:如果系統規模較大且需要多個主節點控制多個從節點,485通訊可能更合適;如果系統規模相對較小且需要多個節點共享同一總線,CAN通訊可能更合適。
如果您需要實現CANBUS通訊與485通訊相互轉換的網關,可以打電話13019325660找我。
晚上,我們“廣成工控”直播間也會聊相關內容,歡迎觀看。




